【GitHub Copilotと作る Pythonで OpenGL 3Dプログラミング】 - 第6回「2D/3Dカメラの実装」
GitHub Copilotと作る Pythonで OpenGL 3Dプログラミング
第6回「2D/3Dカメラの実装」
- GitHub Copilotと作る Pythonで OpenGL 3Dプログラミング
はじめに
前回は座標変換の基礎として、Model・View・Projection行列について学びました。今回は2D/3Dカメラを実装し、それぞれのカメラクラスを作成します。
2Dゲームや3Dアプリケーションでは、それぞれ異なる投影方式が必要です。2Dでは正射影(Orthographic Projection)、3Dでは透視投影(Perspective Projection)を使用します。
今回のゴール
- Camera2D / Camera3D クラスを作成し、用途に応じて使い分け
- 正射影(2Dカメラ)の実装
- 透視投影(3Dカメラ)の実装
- 3Dカメラのオービット(球面座標)とパン(平行移動)操作
- imguiでカメラモードとパラメータを調整
正射影と透視投影の違い
正射影(Orthographic Projection)
正射影は、距離に関係なく同じサイズで表示される投影方式です。
┌─────────┐ │ │ │ ● │ ← どの距離でも同じサイズ │ │ └─────────┘
特徴:
- 遠近感がない
- 2Dゲーム、UI、設計図などに適している
- ズーム倍率で表示範囲を制御
透視投影(Perspective Projection)
前回実装した透視投影は、人間の目やカメラのように遠くのものほど小さく見える投影方式です。
視点
╲│╱
●
╱│╲
/ │ \
/ │ \
/ │ \
╱────┼────╲ ← 遠くのクリップ面
特徴:
- 遠近感がある
- 3Dシーンに適している
- FOV(視野角) でズームを制御
カメラクラスの設計
今回は基底クラス + 派生クラスの構成でカメラを実装します。
CameraBase (抽象基底クラス) ├── Camera2D (正射影カメラ) └── Camera3D (透視投影カメラ)
この設計により:
- 2Dと3Dで異なるパラメータを明確に分離
- 共通インターフェース(
view_matrix,projection_matrix)を提供 - 教育的にわかりやすい構造
CameraBaseクラス(基底クラス)
src/graphics/camera.pyを作成します。
""" カメラモジュール 2D/3Dカメラの基底クラスと派生クラスを提供 """ from abc import ABC, abstractmethod from enum import Enum from typing import Tuple, Union import numpy as np from src.utils.logger import logger class CameraMode(Enum): """カメラモード""" CAMERA_2D = 0 # 正射影(2D) CAMERA_3D = 1 # 透視投影(3D) class CameraBase(ABC): """ カメラの基底クラス View行列とProjection行列を提供する抽象クラス """ def __init__(self, width: int = 800, height: int = 600) -> None: self._width = width self._height = height self._aspect = width / height if height > 0 else 1.0 # 行列のキャッシュ self._view_matrix = np.eye(4, dtype=np.float32) self._projection_matrix = np.eye(4, dtype=np.float32) @property @abstractmethod def mode(self) -> CameraMode: """カメラモードを取得""" pass @property def view_matrix(self) -> np.ndarray: """View行列を取得""" return self._view_matrix @property def projection_matrix(self) -> np.ndarray: """Projection行列を取得""" return self._projection_matrix @abstractmethod def reset(self) -> None: """カメラをデフォルト状態にリセット""" pass
Camera2Dクラス(正射影カメラ)
2Dカメラはシンプルな平行移動、ズーム、回転を提供します。
class Camera2D(CameraBase): """ 2Dカメラクラス 正射影(Orthographic Projection)を使用 """ def __init__(self, width: int = 800, height: int = 600) -> None: super().__init__(width, height) # カメラ位置(XY平面上のオフセット) self._position_x = 0.0 self._position_y = 0.0 # ズーム倍率 self._zoom = 1.0 # 回転角度(度) self._rotation = 0.0 # クリップ面 self._near = -10.0 self._far = 10.0 self._update_view_matrix() self._update_projection_matrix() logger.info("Camera2D initialized") @property def mode(self) -> CameraMode: return CameraMode.CAMERA_2D @property def position(self) -> Tuple[float, float]: """カメラ位置を取得(2D: XY座標)""" return (self._position_x, self._position_y) def set_position(self, x: float, y: float) -> None: """カメラ位置を設定""" self._position_x = x self._position_y = y self._update_view_matrix() @property def zoom(self) -> float: return self._zoom def set_zoom(self, zoom: float) -> None: self._zoom = max(0.01, zoom) self._update_projection_matrix() @property def rotation(self) -> float: """回転角度を取得(度)""" return self._rotation def set_rotation(self, rotation: float) -> None: """回転角度を設定(度)""" self._rotation = rotation % 360.0 self._update_view_matrix()
2D用View行列
2Dモードでは、回転と平行移動を組み合わせたView行列を使用します。
def _update_view_matrix(self) -> None: """View行列を更新""" # 回転行列を計算 angle_rad = np.radians(self._rotation) cos_a = np.cos(angle_rad) sin_a = np.sin(angle_rad) # View行列 = 回転 * 平行移動 self._view_matrix = np.eye(4, dtype=np.float32) # 回転部分 self._view_matrix[0, 0] = cos_a self._view_matrix[0, 1] = sin_a self._view_matrix[1, 0] = -sin_a self._view_matrix[1, 1] = cos_a # 平行移動部分(回転後の座標系で適用) self._view_matrix[0, 3] = -(cos_a * self._position_x + sin_a * self._position_y) self._view_matrix[1, 3] = -(-sin_a * self._position_x + cos_a * self._position_y)
回転と平行移動を組み合わせることで、カメラを回転させても正しくオフセットが適用されます。
正射影行列の計算
def _update_projection_matrix(self) -> None: """Projection行列を更新(正射影)""" # ズームを適用した表示範囲 half_width = self._aspect / self._zoom half_height = 1.0 / self._zoom left = -half_width right = half_width bottom = -half_height top = half_height # 正射影行列 self._projection_matrix = np.zeros((4, 4), dtype=np.float32) self._projection_matrix[0, 0] = 2.0 / (right - left) self._projection_matrix[1, 1] = 2.0 / (top - bottom) self._projection_matrix[2, 2] = -2.0 / (self._far - self._near) self._projection_matrix[0, 3] = -(right + left) / (right - left) self._projection_matrix[1, 3] = -(top + bottom) / (top - bottom) self._projection_matrix[2, 3] = -(self._far + self._near) / (self._far - self._near) self._projection_matrix[3, 3] = 1.0
正射影行列の各要素:
- [0,0] と [1,1]: 表示範囲を正規化(-1〜1)
- [2,2]: Z方向の正規化
- [0,3], [1,3], [2,3]: 中心へのオフセット
Camera3Dクラス(透視投影カメラ)
3Dカメラはオービット(球面座標)とパン(平行移動)の2つの操作方法を提供します。
class Camera3D(CameraBase): """ 3Dカメラクラス 透視投影(Perspective Projection)を使用 """ def __init__(self, width: int = 800, height: int = 600) -> None: super().__init__(width, height) # カメラ位置 self._position = np.array([0.0, 0.0, 5.0], dtype=np.float32) # カメラの視点(見る点) self._target = np.array([0.0, 0.0, 0.0], dtype=np.float32) # 上ベクトル self._up = np.array([0.0, 1.0, 0.0], dtype=np.float32) # 透視投影パラメータ self._fov = 45.0 # 視野角(度) self._near = 0.1 self._far = 100.0 self._update_view_matrix() self._update_projection_matrix() logger.info("Camera3D initialized")
オービット操作(球面座標)
オービットは、視点(target)を中心として球面上にカメラを配置する操作です。マウスドラッグでの回転操作のベースになります。
↑ Y (elevation)
│
│ ● カメラ
│ /
│/ distance
●────→ X (azimuth)
target
def set_orbit(self, azimuth: float, elevation: float, distance: float) -> None: """ オービット(球面座標)でカメラ位置を設定 Args: azimuth: 方位角(水平回転、度)0=正面、90=右、-90=左 elevation: 仰角(垂直回転、度)0=水平、90=真上、-90=真下 distance: 視点からの距離 """ azimuth_rad = np.radians(azimuth) elevation_rad = np.radians(elevation) # 球面座標からカメラ位置を計算 x = distance * np.cos(elevation_rad) * np.sin(azimuth_rad) y = distance * np.sin(elevation_rad) z = distance * np.cos(elevation_rad) * np.cos(azimuth_rad) self._position = self._target + np.array([x, y, z], dtype=np.float32) self._update_view_matrix() def get_orbit(self) -> Tuple[float, float, float]: """現在のオービットパラメータを取得""" rel = self._position - self._target distance = float(np.linalg.norm(rel)) if distance < 0.001: return (0.0, 0.0, distance) rel_norm = rel / distance elevation = np.degrees(np.arcsin(np.clip(rel_norm[1], -1.0, 1.0))) azimuth = np.degrees(np.arctan2(rel_norm[0], rel_norm[2])) return (float(azimuth), float(elevation), distance)
パン操作(平行移動)
パンは、カメラと視点を同時に移動させる操作です。2Dカメラのオフセットと同様の動きになります。
def set_pan(self, x: float, y: float, z: float) -> None: """ カメラのパン位置を設定 カメラ位置と視点の両方にオフセットを適用 """ default_pos = np.array([0.0, 0.0, 5.0], dtype=np.float32) default_target = np.array([0.0, 0.0, 0.0], dtype=np.float32) offset = np.array([x, y, z], dtype=np.float32) self._position = default_pos + offset self._target = default_target + offset self._update_view_matrix() @property def pan(self) -> Tuple[float, float, float]: """現在のパンオフセットを取得""" return tuple(self._target)
Look At行列(View行列)
3DカメラではLook At行列を使用します。
def _update_view_matrix(self) -> None: """View行列を更新(Look At行列)""" eye = self._position target = self._target up = self._up # 前方向ベクトル(正規化) forward = target - eye forward = forward / np.linalg.norm(forward) # 右ベクトル right = np.cross(forward, up) right = right / np.linalg.norm(right) # 新しい上ベクトル up_new = np.cross(right, forward) # View行列を構築 self._view_matrix = np.eye(4, dtype=np.float32) self._view_matrix[0, 0:3] = right self._view_matrix[1, 0:3] = up_new self._view_matrix[2, 0:3] = -forward self._view_matrix[0, 3] = -np.dot(right, eye) self._view_matrix[1, 3] = -np.dot(up_new, eye) self._view_matrix[2, 3] = np.dot(forward, eye)
アプリケーションへの統合
app.pyでCamera2D/Camera3Dクラスを使用するように変更します。
from src.graphics import Shader, Camera2D, Camera3D, CameraMode class App: def __init__(self) -> None: # ... # カメラ(2D/3D切り替え対応) self._camera_2d = Camera2D(800, 600) self._camera_3d = Camera3D(800, 600) self._use_3d_camera = True # 3Dカメラを使用 # 座標変換(Model行列用) self._transform = Transform()
カメラウィンドウの更新
モードに応じて異なる設定UIを表示します。
def _draw_camera_window(self) -> None: """Draw camera window""" imgui.begin("Camera") # Camera mode selection mode_names = ["2D (Orthographic)", "3D (Perspective)"] current_mode = 1 if self._use_3d_camera else 0 changed_mode, new_mode = imgui.combo("Mode", current_mode, mode_names) if changed_mode: self._use_3d_camera = (new_mode == 1) imgui.separator() if not self._use_3d_camera: # === 2D Camera Settings === imgui.text("2D Camera Settings") cam_pos = self._camera_2d.position changed_x, cam_x = imgui.slider_float("Offset X", cam_pos[0], -5.0, 5.0) changed_y, cam_y = imgui.slider_float("Offset Y", cam_pos[1], -5.0, 5.0) if changed_x or changed_y: self._camera_2d.set_position(cam_x, cam_y) changed_zoom, zoom = imgui.slider_float("Zoom", self._camera_2d.zoom, 0.1, 5.0) if changed_zoom: self._camera_2d.set_zoom(zoom) # Rotation changed_rot, rotation = imgui.slider_float("Rotation", self._camera_2d.rotation, 0.0, 360.0) if changed_rot: self._camera_2d.set_rotation(rotation) else: # === 3D Camera Settings === imgui.text("3D Camera Settings") # Orbit (spherical coordinates around target) if imgui.collapsing_header("Orbit (Rotate around target)"): orbit = self._camera_3d.get_orbit() changed_az, azimuth = imgui.slider_float("Azimuth", orbit[0], -180.0, 180.0) changed_el, elevation = imgui.slider_float("Elevation", orbit[1], -89.0, 89.0) changed_dist, distance = imgui.slider_float("Distance", orbit[2], 1.0, 20.0) if changed_az or changed_el or changed_dist: self._camera_3d.set_orbit(azimuth, elevation, distance) # Pan (parallel translation) if imgui.collapsing_header("Pan (Move camera and target)"): pan = self._camera_3d.pan changed_pan_x, pan_x = imgui.slider_float("Pan X", pan[0], -5.0, 5.0) changed_pan_y, pan_y = imgui.slider_float("Pan Y", pan[1], -5.0, 5.0) changed_pan_z, pan_z = imgui.slider_float("Pan Z", pan[2], -5.0, 5.0) if changed_pan_x or changed_pan_y or changed_pan_z: self._camera_3d.set_pan(pan_x, pan_y, pan_z) # Projection settings if imgui.collapsing_header("Projection"): changed_fov, fov = imgui.slider_float("FOV", self._camera_3d.fov, 15.0, 120.0) if changed_fov: self._camera_3d.set_fov(fov) # Reset button if imgui.button("Reset Camera"): if self._use_3d_camera: self._camera_3d.reset() else: self._camera_2d.reset() imgui.end()
描画時の行列設定
def _draw_triangle(self) -> None: """Draw triangle""" # ... # Get current camera camera = self._camera_3d if self._use_3d_camera else self._camera_2d # Set matrices to shader self._shader.set_mat4("model", self._transform.model) self._shader.set_mat4("view", camera.view_matrix) self._shader.set_mat4("projection", camera.projection_matrix)
3Dカメラの操作方法
3Dカメラには2つの操作方法があります。
オービット(Orbit)
視点(三角形のある原点)を中心に、カメラが球面上を移動します。
| パラメータ | 説明 | 範囲 |
|---|---|---|
| Azimuth(方位角) | 水平回転 | -180° 〜 +180° |
| Elevation(仰角) | 垂直回転 | -89° 〜 +89° |
| Distance(距離) | 視点からの距離 | 1 〜 20 |
次回のPhase 5c「マウスでカメラ操作」で、マウスドラッグでの回転操作のベースになります。
パン(Pan)
カメラと視点を同時に平行移動します。2Dカメラのオフセットと同様の動きです。
| パラメータ | 説明 |
|---|---|
| Pan X | 左右に移動 |
| Pan Y | 上下に移動 |
| Pan Z | 前後に移動 |
動作確認
プログラムを実行してみましょう。
source .venv/bin/activate && python -m src.main
CameraウィンドウでModeを切り替えると:
- 2D (Orthographic): 遠近感なし、ズームで表示範囲を変更
- 3D (Perspective): 遠近感あり、オービットとパンで操作
3Dモードでは: - OrbitセクションのAzimuthを動かすと、三角形の周りを水平に回転 - Elevationを動かすと、上下に回転 - Panセクションで平行移動
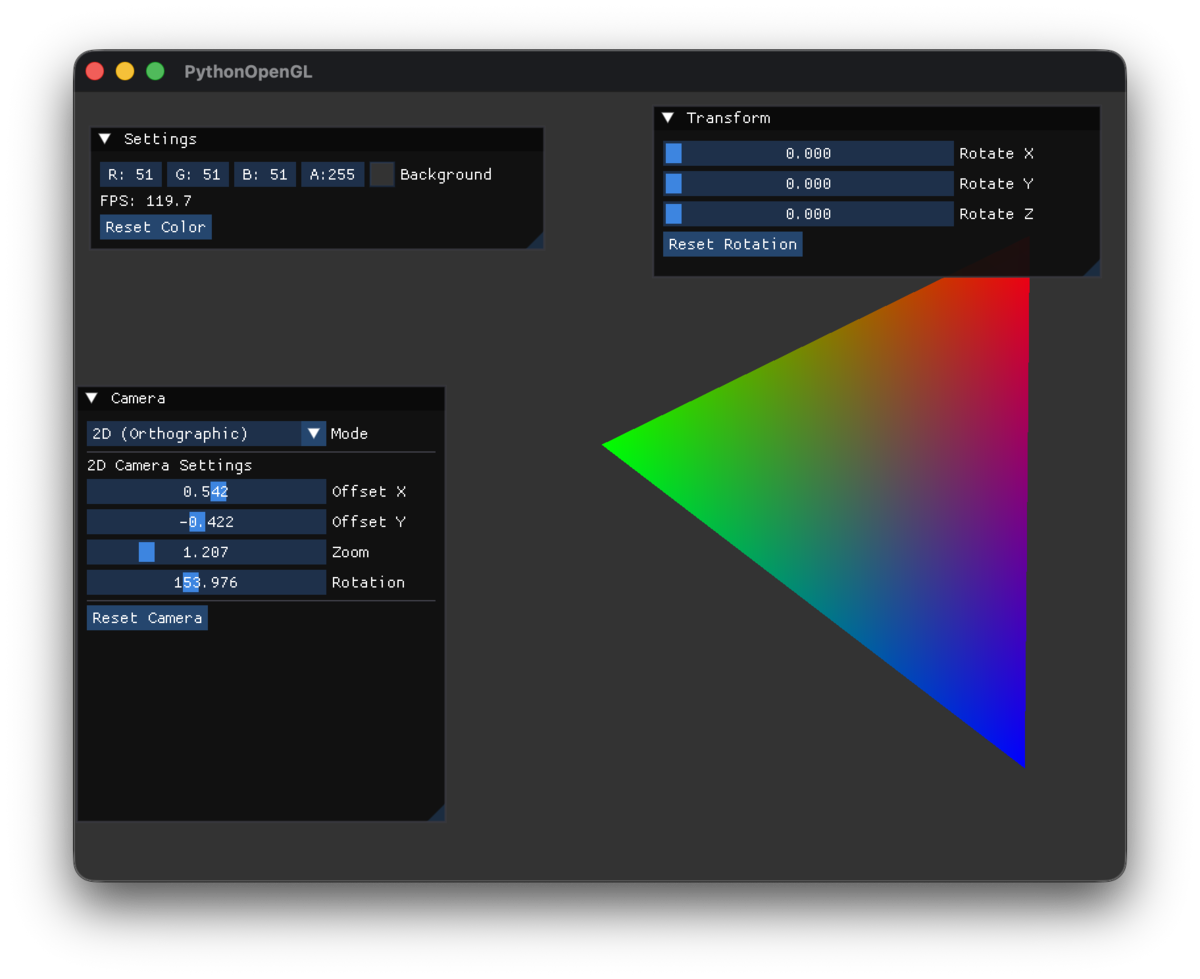
2Dモードの実行結果
2Dモードでは、Offset X/Y、Zoom、Rotationで操作できます。
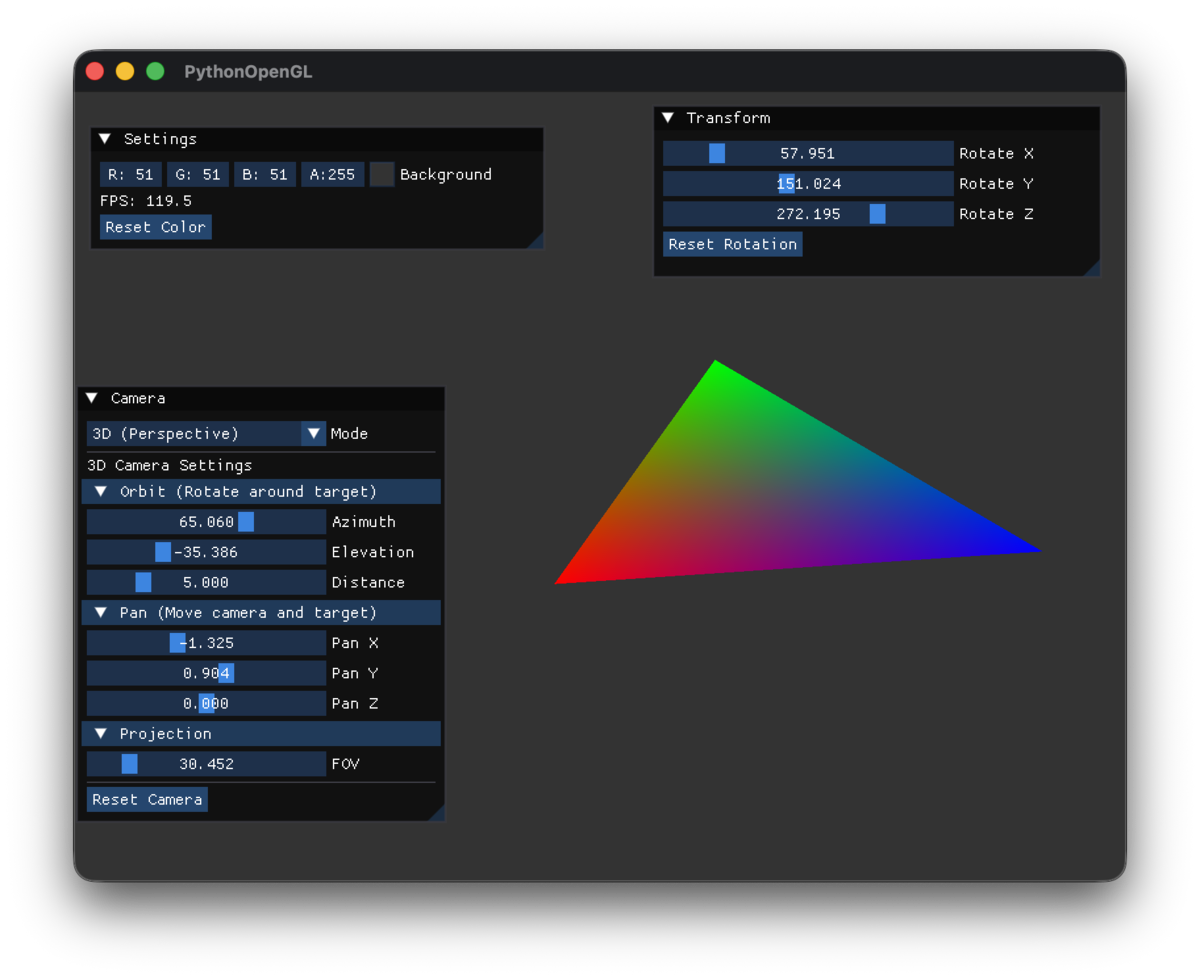
3Dモードの実行結果
3Dモードでは、Orbit(球面座標)、Pan(平行移動)、Projection(FOV)で操作できます。
2Dと3Dの使い分け
| 用途 | 推奨モード | 理由 |
|---|---|---|
| 2Dゲーム | 正射影 | 距離に関係なく同じサイズ |
| UI/HUD | 正射影 | ピクセル単位で配置したい |
| 3Dシーン | 透視投影 | リアルな遠近感 |
| CAD/設計図 | 正射影 | 寸法が正確 |
| アイソメトリック | 正射影 | 斜め上から見下ろすスタイル |
クラス構成のまとめ
CameraBase (抽象基底クラス)
│
├── Camera2D (正射影カメラ)
│ ├── position: (x, y) - 2D座標
│ ├── zoom: ズーム倍率
│ ├── rotation: 回転角度
│ └── set_position(x, y), set_rotation(angle)
│
└── Camera3D (透視投影カメラ)
├── position: (x, y, z) - 3D座標
├── target: 視点
├── fov: 視野角
├── set_orbit(azimuth, elevation, distance) - 球面座標
├── set_pan(x, y, z) - 平行移動
└── set_distance(distance) - 距離変更
2Dカメラの操作方法
| パラメータ | 説明 |
|---|---|
| Offset X/Y | 左右・上下に移動 |
| Zoom | ズーム倍率(拡大・縮小) |
| Rotation | 回転角度(0〜360度) |
まとめ
今回は2D/3Dカメラを実装しました。
- CameraBase 抽象基底クラスで共通インターフェースを定義
- Camera2D は正射影で、オフセットとズームを提供
- Camera3D は透視投影で、オービットとパンを提供
- オービットは球面座標でカメラを配置(マウスドラッグ回転のベース)
- パンは平行移動(2Dオフセットと同様の動き)
次回はマウスでカメラ操作を実装します。ドラッグでオービット、右ドラッグでパン、ホイールでズームなど、インタラクティブなカメラ操作を追加していきます。
前回: 第5回「座標変換の基礎」
次回: 第7回「マウスでカメラ操作」